
由于室外惡劣天氣對(duì)AGV位置檢測(cè)的影響,AGV導(dǎo)航系統(tǒng)的位置和轉(zhuǎn)向控制部件無(wú)法根據(jù)AGV的目標(biāo)設(shè)定位置與檢測(cè)位置的偏差來(lái)引導(dǎo)AGV的自動(dòng)行走,從而最終到達(dá)目標(biāo)設(shè)定位置。
針對(duì)上述裝置和導(dǎo)航系統(tǒng)中存在的技術(shù)問(wèn)題,借助TRIZ知識(shí)庫(kù)和創(chuàng)新原理的實(shí)際應(yīng)用,本文得出以下適合戶外工業(yè)應(yīng)用的AGV導(dǎo)航系統(tǒng)方案:
1)在AGV as AGV非接觸式防撞探測(cè)裝置的前方和兩側(cè)安裝雷達(dá)系統(tǒng),防止AGV與其他物體直接碰撞;
2)在AGV小車各行車道兩側(cè)每隔2米安裝一根RFID地標(biāo)柱。RFID地標(biāo)對(duì)車輛的定位精度在30毫米左右,每個(gè)RFID地標(biāo)柱可以選擇是否安裝電動(dòng)輔助熱融冰、除雪裝置、吹掃除塵裝置等。
3)在AGV車道中間埋一根電磁導(dǎo)航線;
4)在AGV小車上安裝陀螺儀和速度編碼器,陀螺儀用于測(cè)量AGV小車的方位角,速度編碼器用于測(cè)量AGV小車的速度;
5)在AGV臺(tái)車內(nèi)置電磁導(dǎo)航和慣性導(dǎo)航兩種導(dǎo)航模式,相互備用,可根據(jù)需要隨時(shí)切換;
6)在不需要轉(zhuǎn)彎的地方,AGV使用電磁導(dǎo)航,慣性導(dǎo)航處于待機(jī)狀態(tài)。此時(shí)AGV依靠電磁導(dǎo)航控制方向,速度編碼器控制速度并計(jì)算其實(shí)際位置,以及RFID地標(biāo)修正其實(shí)際位置信息;
7)在需要轉(zhuǎn)彎的地方,AGV車由慣性導(dǎo)航引導(dǎo),電磁導(dǎo)航處于待機(jī)模式。此時(shí)AGV方向由陀螺儀控制,速度由速度編碼器控制,實(shí)際位置由陀螺儀提供的方向角和速度編碼器提供的速度計(jì)算,位置信息由RFID地標(biāo)校正。
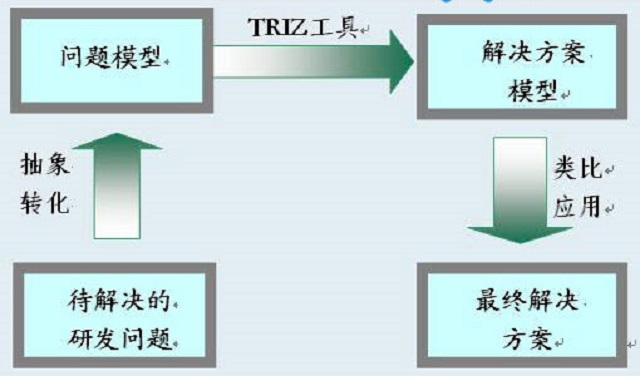
TRIZ根據(jù)理論,技術(shù)系統(tǒng)進(jìn)化的過(guò)程就是不斷解決現(xiàn)有矛盾的過(guò)程。創(chuàng)新的核心是矛盾的解決。在不同的時(shí)代,不同領(lǐng)域的不同問(wèn)題往往會(huì)反復(fù)采用同一個(gè)原理來(lái)解決。

全國(guó)服務(wù)熱線:
400-777-6907

服務(wù)項(xiàng)目
精益生產(chǎn)咨詢
六西格瑪咨詢
天行健企業(yè)管理顧問(wèn)有限公司 全國(guó)服務(wù)熱線:400-777-6907
郵箱:zyg@leanchina.cn 網(wǎng)址:m.0877zx.cn

關(guān)注天行健微信
既獲取更多信息
版權(quán)所有@深圳市天行健企業(yè)管理顧問(wèn)有限公司 粵ICP備13011693號(hào)
目中有效應(yīng)用TRIZ理論的指導(dǎo)?")


